
Les écarts entre la science-fiction et la réalité se réduisent. Il est désormais possible d’utiliser un bras robotique, un troisième bras. La méthodologie développée par une des équipes de recherche du Third-Arm Project défriche le terrain dans ce domaine.
Lucie Layat
Cette méthodologie permet dès aujourd’hui à d’autres de développer des membres robotiques supplémentaires facilement et précisément contrôlables. L’usage de ces membres additionnels pour le maintien en place, le transport d’outils, la rotation à vitesse constante ou les trois à la fois par exemple, pourraient être utiles dans pléthore de professions, chirurgien, soudeur, horloger etc. Jérémy Oliver membre d’une équipe de recherche du Third-Arm Project, explique que “Le point central de cette recherche est de savoir si l’on peut intégrer un bras supplémentaire dans notre schéma sensori-moteur sans compromettre d’autres actions.” L’augmentation de l’humain étant considéré de façon très similaire à la réparation via des prothèses par les neurosciences. Il faut trouver des moyens de contrôler les moteurs et d’interagir avec l’utilisateur qui lui permettent de maintenir ses fonctions naturelles, par exemple la capacité à se mouvoir, marcher, regarder aux alentours, parler. Ce que ne permettaient pas jusque-là les dispositifs existants.
Augmenter des capacités sans impacter d’autres fonctions
Les grandes lignes de la méthodologie sont communes aux deux blocs. Le bloc d’évaluation est à effectuer à la fin du processus. On commence par définir une stratégie comprenant une solution technique, soit pour contrôler les mouvements du XRA (bloc moteur), soit pour que l’utilisateur obtienne un retour sensoriel lui permettant d’ajuster ses mouvements avec le XRA (bloc sensoriel). On évalue ensuite sa pertinence : est-ce qu’on obtient les mouvements désirés pour le bloc moteur ? Est-ce que le retour sensoriel permet à l’utilisateur de sentir le mouvement du bras robotique assez clairement ?
La dernière étape des deux blocs consiste à observer s’il y a des interférences avec les mouvements ou fonctions naturelles de l’utilisateur. Par exemple, si la stratégie moteur initiale est de contrôler les moteurs par les mouvements du pied droit pour d’avancer ou reculer le bras robotique, la fonction “marcher” est alors compromise. L’utilisateur est limité dans ses fonctions naturelles, il importe de réitérer jusqu’à trouver une interface machine humain (HMI) qui lui convienne. Le bloc d’évaluation est un test en conditions sur la durée, pour évaluer si l’interface humain-machine (ou les interfaces, si une “moteur” et une “sensorielle” sont testées couplées) est adéquate pour l’utilisation indépendante et coordonnée du XRA. Cette méthodologie utilise plusieurs essais qui impliquent la présence du bras robotique. Ceux-ci peuvent parfaitement être conduits en réalité virtuelle. D’ailleurs, ils ont d’abord fait des tests sur un avatar en réalité virtuelle puis les ont ensuite validés dans le monde réel au moyen d’un bras robotique physique au sein de l’HEPIA.
Interface humain-machine multimodale
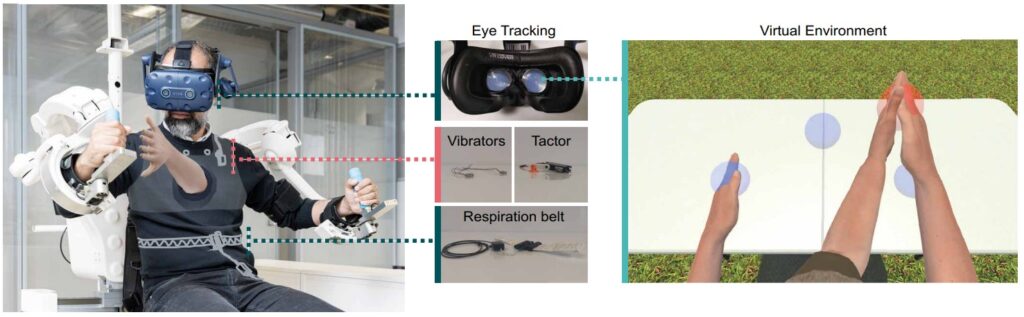
Afin de tester cette méthodologie pour plusieurs scénarios, l’équipe a développé une plateforme neuro-robotique modulaire intégrant la réalité virtuelle et un exosquelette bilatéral pour les membres supérieurs. Ici plusieurs dispositifs sont couplés afin que le résultat soit non-intrusif, exploitant deux façons de contrôler les moteurs indépendamment des membres supérieurs. Le regard oriente la trajectoire et la modulation de la respiration par le diaphragme contrôle le mouvement. Concernant l’interface sensorielle, un dispositif de feedback haptique (sur le toucher) placé entre chaque main de l’utilisateur lui permet d’obtenir des informations tactiles et proprioceptives via des vibrations et l’indentation de la peau.
L’utilisateur est limité dans ses fonctions naturelles, il importe de réitérer jusqu’à trouver une HMI qui lui convienne.