Michel Lauria, professeur associé à l’institut des sciences et des technologies industrielles à hepia, ingénieur en microtechnique de l’EPFL et docteur en robotique, dévoile deux de ses projets : le robot rotule à architecture parallèle à très haute dynamique et une visseuse intelligente instrumentée dotée d’un système de vision pour le contrôle qualité des assemblages vissés, star de la dernière édition du salon EPHJ de Genève. Entretien.
Parfois, la réalité dépasse la fiction. C’est le cas au Laboratoire de Robotique d’hepia à Genève (Haute École du Paysage, d’Ingénierie et d’Architecture), qui compte une armée de chercheurs s’évertuant à inventer notre futur. Ambiance décontractée dans les couloirs interminables de ce centre de recherche d’excellence à Genève. Dans les nombreux laboratoires, des professeurs et des étudiants travaillent à trouver des solutions aux problèmes techniques auquel est confronté le monde industriel. Ces laboratoires naviguent entre la recherche fondamentale et les applications industrielles. Objectifs : créer de nouvelles machines automatiques et précises aux applications les plus diverses : secteurs automobile, aéronautique, biomédical.
Concernant le mécanisme de rotule motorisée, quels sont les applications de ce robot à architecture parallèle ?
Michel Lauria : Des applications sont possibles dans l’horlogerie mais pas seulement. Avec cet appareil il est possible d’orienter un objet selon trois degrés de liberté avec une très bonne rapidité de mouvement, une excellente répétitivité et de bonnes accélérations pour pouvoir ensuite par exemple utiliser le robot pour des tâches d’assemblage ou pour réaliser un présentoir dynamique. Lorsque les horlogers contrôlent les montres, ils font ce qu’on appelle du « visitage », Autrement dit, ils inspectent le garde-temps sous plusieurs angles afin de déceler les éventuels défauts de fabrication. La pénibilité de cette tâche très répétitive pourrait être atténuée grâce à une assistance robotisée. Le robot rotule à architecture parallèle se prête parfaitement à ce type d’application.
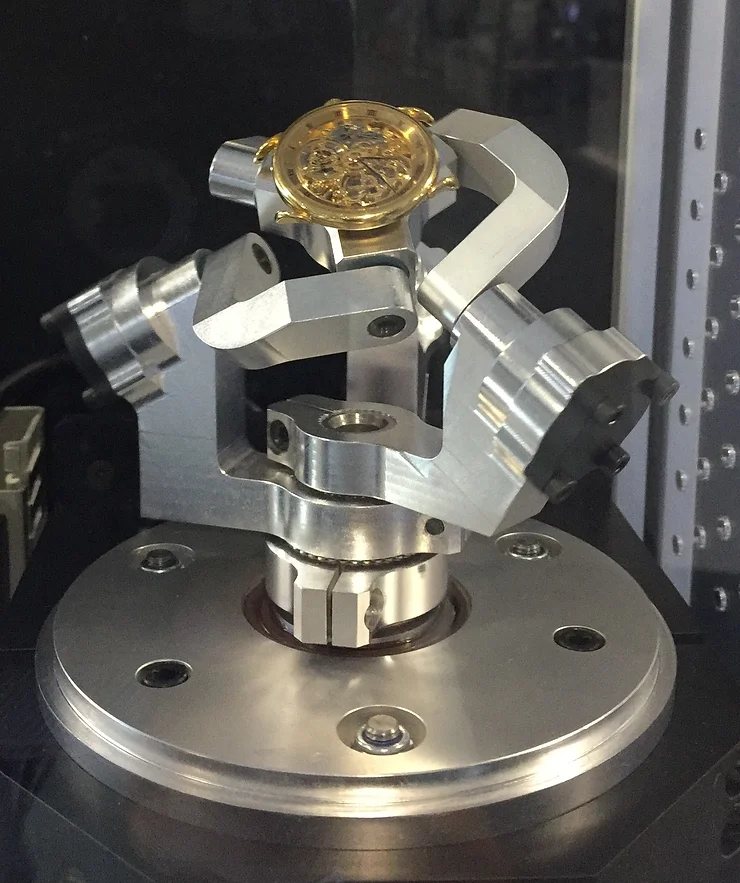

Pour quel type d’application, ce robot a-t-il été conçu à l’origine ?
Michel Lauria : Nous avons construit ce robot dans le but de reproduire le mouvement de la nageoire des manchots, que l’on retrouve en Antarctique, capables de nager à 35km/heure alors que le meilleur nageur olympique n’excède pas les 9,5km/h. La cinématique parallèle a été conçue afin de trouver des nouveaux systèmes de propulsions subaquatique.
Quel sera l’impact de ce robot dans le milieu scientifique ?
Miche Lauria : Du point de vue de la recherche fondamentale, ce type de projet a été utilisé afin de comprendre les turbulences qui se créent lorsqu’on excite une nageoire sous l’eau. Il y a eu plusieurs travaux de doctorat sur ces aspects physiques qui ont pu être réalisés grâce à cette machine à Caltech (Pasadena), l’un des centres de recherche les plus prolifiques aux États-Unis.
Quelle est la suite à donner à votre prototype ?
Michel Lauria : Notre mission est de développer de nouvelles idées et de les transférer par la suite au monde industriel au travers de start-ups ou à des entreprises déjà existantes. Ce robot dispose d’autres atouts dans sa manche comme des applications médicales. Pour ce faire, il pourrait servir à la mobilisation des articulations humaines (épaule, hanche) afin de permettre aux chirurgiens d’améliorer leurs techniques d’intervention chirurgicales.
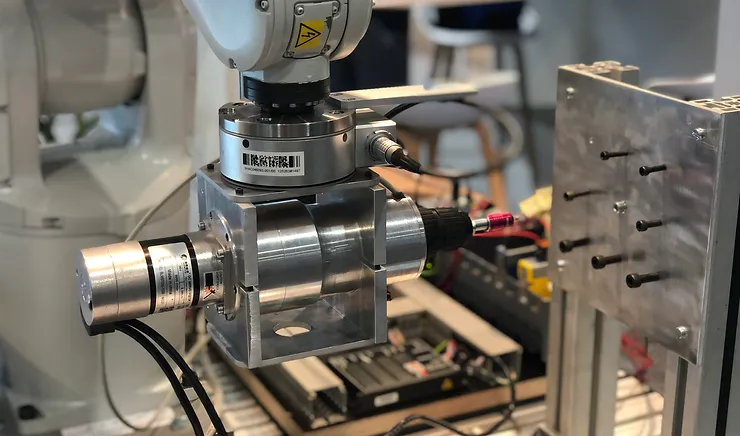
Dans un autre registre, quelle est l’utilité de la visseuse instrumentée développée dans le cadre du projet InnoSuisse ?
Michel Lauria : Le vissage est l’opération la plus répandue dans les chaines de production industrielles. Dans l’industrie automobile par exemple, il importe de serrer chaque vis selon un schéma d’assemblage pré-établi avec la bonne force de serrage. Par exemple, cette visseuse est capable de mémoriser les opérations manuelles effectuées par l’opérateur. A-t-il mis la bonne vis au bon endroit en respectant le schéma de montage ? A-t-il choisi la bonne vis et a-t-il appliqué le bon couple de serrage. Ces applications concernent également le domaine aérospatial, très pointilleux dans les procédures d’assemblage de systèmes complexes. Le but est donc de garantir la qualité de l’assemblage. Ce projet est le fruit d’une collaboration avec deux autres hautes écoles, la HEIG-VD (Haute École d’Ingénierie et de Gestion du Canton de Vaud) et la HE-ARC (Haute Ecole Neuchâtel, Berne, Jura). Il a pu être réalisé grâce au financement apporté par la HES-SO puis des fonds Innosuisse nous ont permis de finaliser un deuxième prototype.
Quelles sont vos nouvelles recherches ?
Michel Lauria : Nous travaillons également sur de nouvelles structures innovantes, très solides et très légères à base de matériaux innovants, et qui pourraient par exemple servir de châssis de protection pour des drones d’inspection. Des architectes du paysage ont également pris contact avec notre école afin d’utiliser ce type de structures pour réaliser des iles flottantes végétalisées aux bords de nos lacs.
Propos recueillis par Michele Caracciolo di Brienza.